凸轮表生成功能块 DFB_CamGenerate 技术解析
凸轮表生成功能块 DFB_CamGenerate 技术解析
莫尘凸轮表生成功能块实现详解
程序结构
功能块采用结构化编程,主要包含以下部分:
完整程序
1 | FUNCTION_BLOCK DFB_CamGenerate |
主要功能实现
1. 参数校验
程序首先对输入参数进行有效性检查:
1 | IF lrCutLen<=0 OR iCamPointCount<=1 OR CamMasterPos[iCamPointCount-1]<>lrCutLen THEN |
2. 凸轮表生成
通过循环遍历所有点位,生成凸轮表数据:
1 | FOR n:=0 TO (iCamPointCount-1) BY 1 DO |
3. 凸轮表配置
设置凸轮表参数:
1 | Cam.nElements := iCamPointCount; |
使用说明
输入参数
| 参数名 | 类型 | 说明 |
|---|---|---|
| bExecute | BOOL | 执行信号 |
| iCamPointCount | INT | 凸轮关键点数 |
| lrCutLen | LREAL | 凸轮主轴长度 |
| CamMasterPos | ARRAY[0..10] OF LREAL | 主轴点位位置 |
| CamSlavePos | ARRAY[0..10] OF LREAL | 从轴点位位置 |
| CamSlaveVel | ARRAY[0..10] OF LREAL | 从轴点位速度 |
| CamSlaveAcc | ARRAY[0..10] OF LREAL | 从轴点位加速度 |
输出参数
| 参数名 | 类型 | 说明 |
|---|---|---|
| bError | BOOL | 错误标志 |
| bDone | BOOL | 完成标志 |
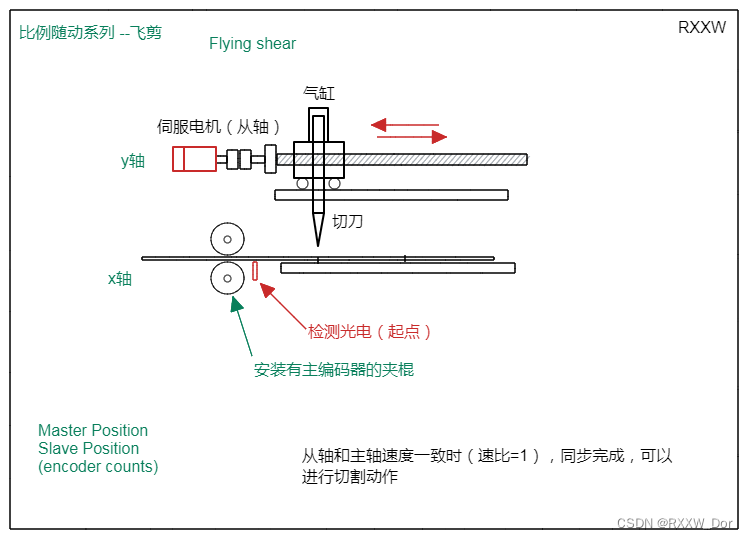
应用场景
本功能块适用于以下场景:
- 包装机械的同步控制
- 印刷机械的套色控制
- 纺织机械的张力控制
- 自动化装配线的同步运动
注意事项
- 确保输入的主轴长度与最后一个点位位置一致
- 主轴点位必须按升序排列
- 从轴参数需与主轴点位一一对应
- 建议在使用前进行参数校验
评论
匿名评论隐私政策